SPIKE Prime 科创套装
训练营 2:与物体互动
使用传感器控制电机,并与赛场上的目标物体进行交互。
30-45 分钟
初级
6-8 年级

课程计划
1.课前准备
- 通过 LEGO® Education SPIKE™ App 应用程序*浏览学生学习材料®。
2.参与(5 分钟)
- 根据下面*要点*组织学生围绕本节课程展开一次讨论。
- 播放视频介绍本节课程。
3.探究(20 分钟)
- 让学生两人一组合作搭建练习驱动底座、机械手臂、标示物和立方体。
- 要求学生尝试两种程序栈,看哪一种可使他们的驱动底座停止在标示物处。
- 要求学生向驱动底座添加编程模块,以实现在距离驱动底座至少 30 厘米(12 英寸)的标示物处降下机械手臂、收集并运回立方体。
4.解释(5 分钟)
- 组织学生讨论如何使用距离传感器测量距离。
5.拓展(15 分钟)
- 让学生进行接力赛,看哪支队伍最快!
- 请记得预留整理时间。
6.评估
- 为每位学生的课堂表现提供反馈。
- 可借助所提供的评价准则来简化此环节。
发起一次讨论
围绕竞赛机器人及其如何寻找目标物体并移动它们的话题,使用下列方式引导学生进行一次讨论:
- 要求学生描述一些自己看到过的情景:机器人将物体从一个地方移动到另一个地方。
- 向学生说明,驱动底座能够使用传感器探测物体,运用附加的电机和机械手臂收集物体。
- 向学生说明,他们将对一个自主机器人进行编程。向学生提问:为什么自主模式在比赛中很重要。
让学生观看这段视频以了解自己的后续任务。

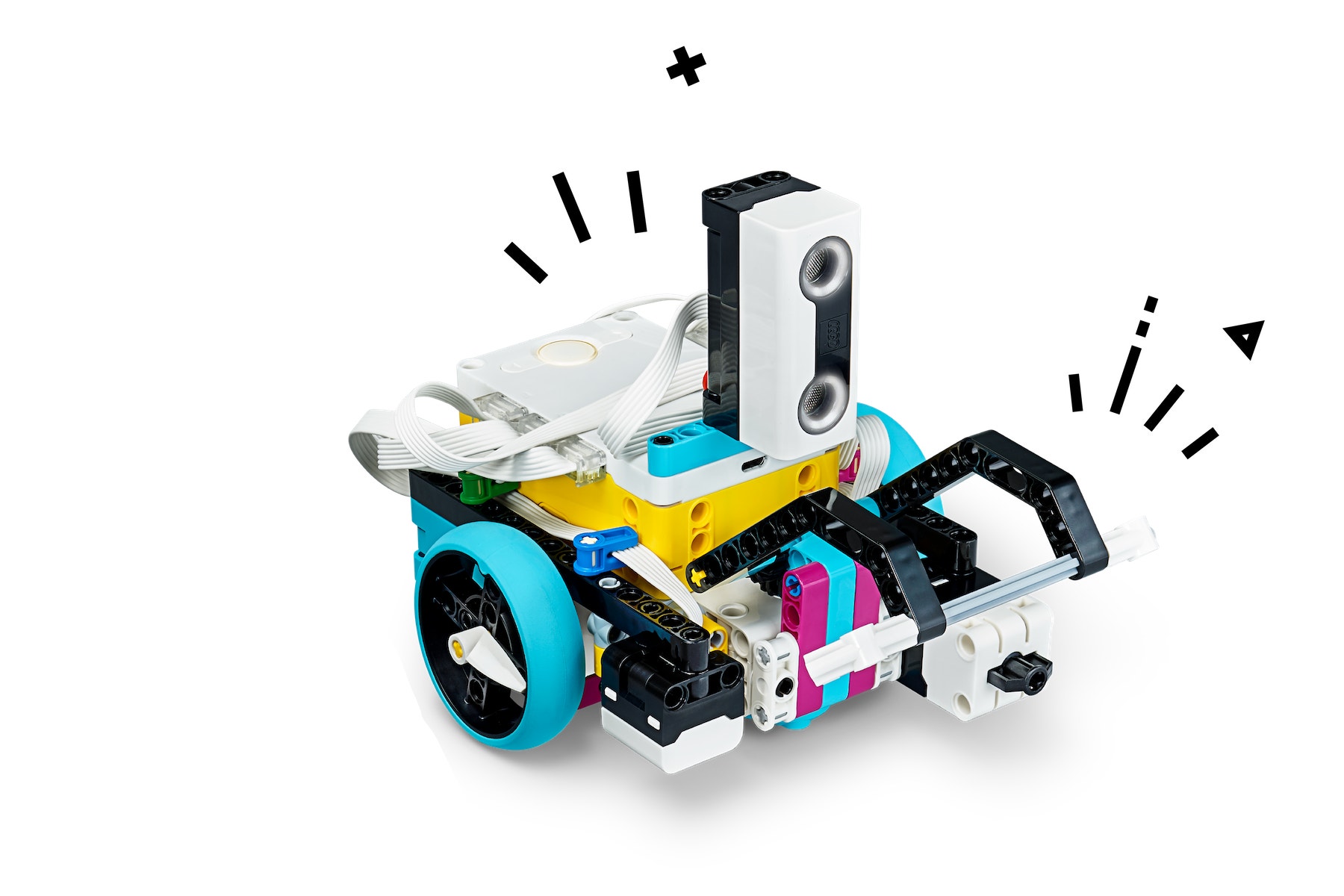
搭建要诀
配有距离传感器的简易驱动底座
使用配有距离传感器的简易驱动底座模型。请记得使用线缆夹。
传感器和机械手臂的距离
学生需要将机械手臂抬升足够的高度(但不能过高),以便于其在立方体上方自由移动。如果抬升过高,将会干扰距离传感器。
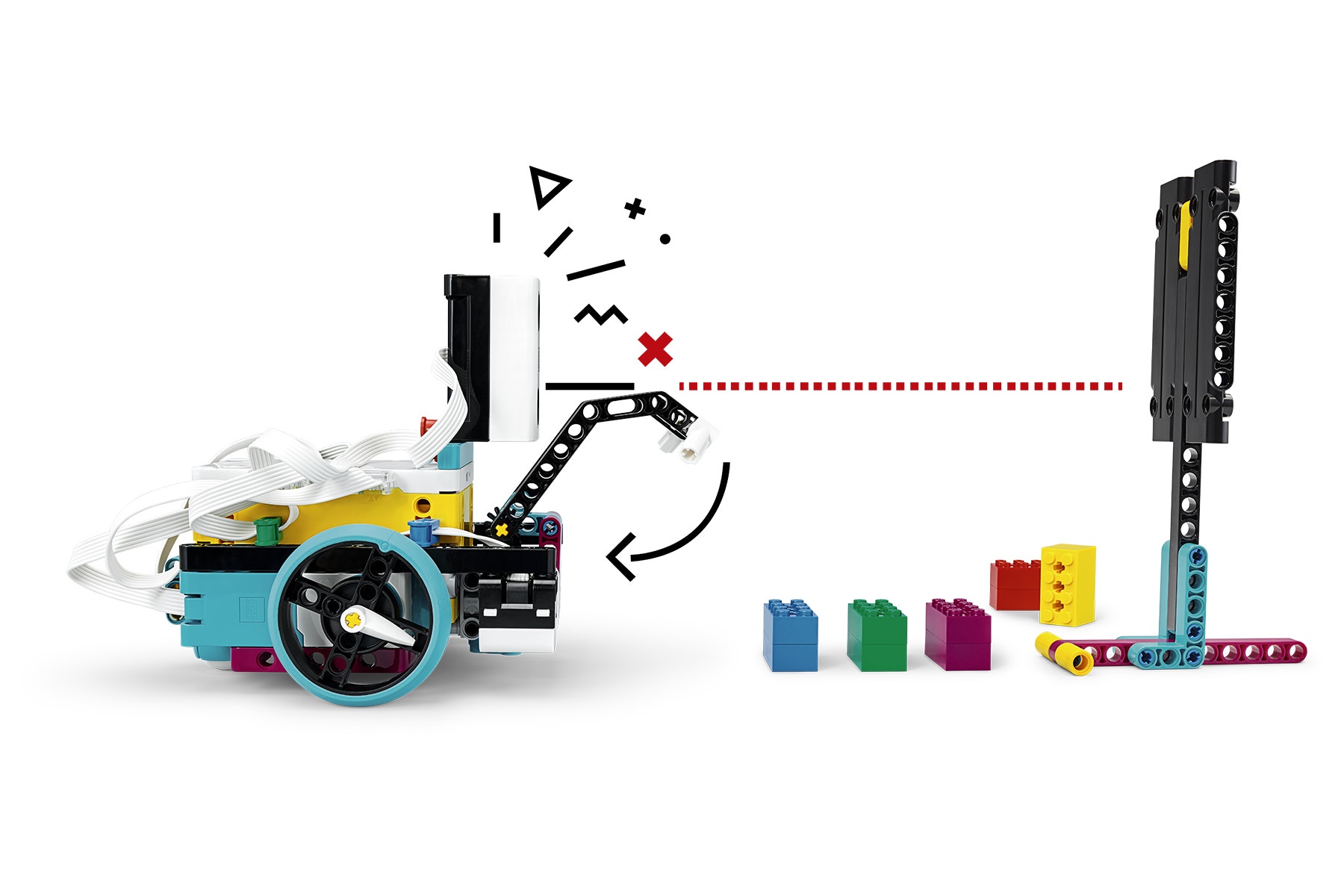
组织一场接力赛
首先将驱动底座与标示物之间的距离设为约 30 厘米。
学生必须手动取下每个被收集的接力棒,以便于驱动底座向前行驶并收集下一个接力棒。

编程要诀
主程序

可行方案

其它程序

分层教学
通过如下方式简化本节课程:
- 多花一些时间讲解如何使用距离传感器
通过如下方式提高学生的学习水平:
- 使用不同的目标物体设置挑战,以练习驱动底座与目标物体进行交互(例如:要求学生使用距离传感器将物体运回初始位置)。
评估环节
教师观察清单
可根据教学需要设定等级,例如:
1.部分完成
2.全部完成
3.超额完成
请使用下列成功标准来评估学生的进度:
- 学生能够扩展自己的程序,取回目标物体。
- 学生能够使用距离传感器探测并取回目标物体。
- 学生能够更改距离传感器模块的参数,以探测不同的距离。
自我评估
让每位学生选择一块最能代表自己当前水平的积木。
- 蓝色:能够使用距离传感器探测并取回目标物体。
- 黄色:能够成功完成接力赛。
- 紫色:能够成功完成接力赛,并能够优化程序,记录下最快的时间。
同伴互评
鼓励学生通过下列方式为同伴提供反馈:
- 让学生根据上面的彩色积木评价标准对彼此的表现进行评分。
- 让学生相互提供建设性的反馈,以提高他们小组在下一堂课中的表现。

语言艺术拓展
引入语言艺术能力培养环节:
- 让学生重新设计比赛,提出自己的规则。要求他们写下规则,创设出支撑性图片。各队伍之间相互挑战。
备注:这部分内容可用作拓展课程。
数学拓展
引入数学能力培养环节:
当学生设计自己的比赛时,要求他们在使用下列数值的过程中最大限度地使用大于 (>) 或小于 (<) 特定数值的数字:
- 距离传感器值
- 反射光传感器值
- 陀螺仪传感器的旋转角度值
备注:这部分内容可用作拓展课程。
职业连接
喜欢这节课的学生可能会对以下相关行业产生兴趣:
- 信息技术(游戏编程)
- 制造与工程(机械技术)
- 制造与工程(工程预科)
教师支持
学生将会:
- 运用估算以实现停止在目标物体处
- 使用距离传感器探测目标物体并做出反应
LEGO Education SPIKE Prime 科创套装
通过计算机程序获取传感器实时采集的信息,并把这些信息记录在数据库中;对这些数据进行二次分析,验证之前的假设,甚至发现新的规律,(7-9年级,综合实践活动,用计算机做科学实验)