WeDo2.0 科学机器人套装
基础实验 C Milo(麦乐)倾斜传感器
探索如何使用倾斜传感器帮助麦乐向基地发送一条信息。
0-30 分钟
初级
1-5年级

1. 准备
(30分钟)
• 请阅读“课堂管理”中的备课准备。
• 阅读实验内容,思考如何能够更好地开展教学。
• 准备向学生介绍实验内容。
• 确定教学目标和学习目标。
• 实验的最终结果:每位学生都需要尝试搭建、编程和记录实验。
• 确保充足的教学和实验时间,以达到最终的教学目标。
注:
建议老师首先依序完成基础实验,然后再开始引导实验。如果不能完成所有的基础实验,请务必完成首要的实验内容,同时确保给予学生充裕的时间来了解和熟悉乐高教材。
在基础实验中,教师可以延长创造阶段编程环节所占用的时间,以便给予学生更多的时间来尽快熟悉和掌握编程方法。
4 组基础实验的建议分配时间:
A. Milo(麦乐)科学漫游器:40 分钟
B. Milo(麦乐)运动传感器:15 分钟
C. Milo(麦乐)倾斜传感器:15 分钟
D. 合作:15 分钟
2. 探究阶段
(3分钟)
讨论问题
- 漫游器与基地之间的交流为何如此重要?
如果漫游器成功完成了任务,却无法将结果传回基地,那么整个任
务也就毫无意义。远距离执行任务时,需要与基地保持信息畅通。 - 要与漫游器进行交流可以借助哪些方法?
目前,在基地与漫游器之间发送无线电信号是通过卫星实现的。
3. 创造阶段
(7分钟)
创造阶段
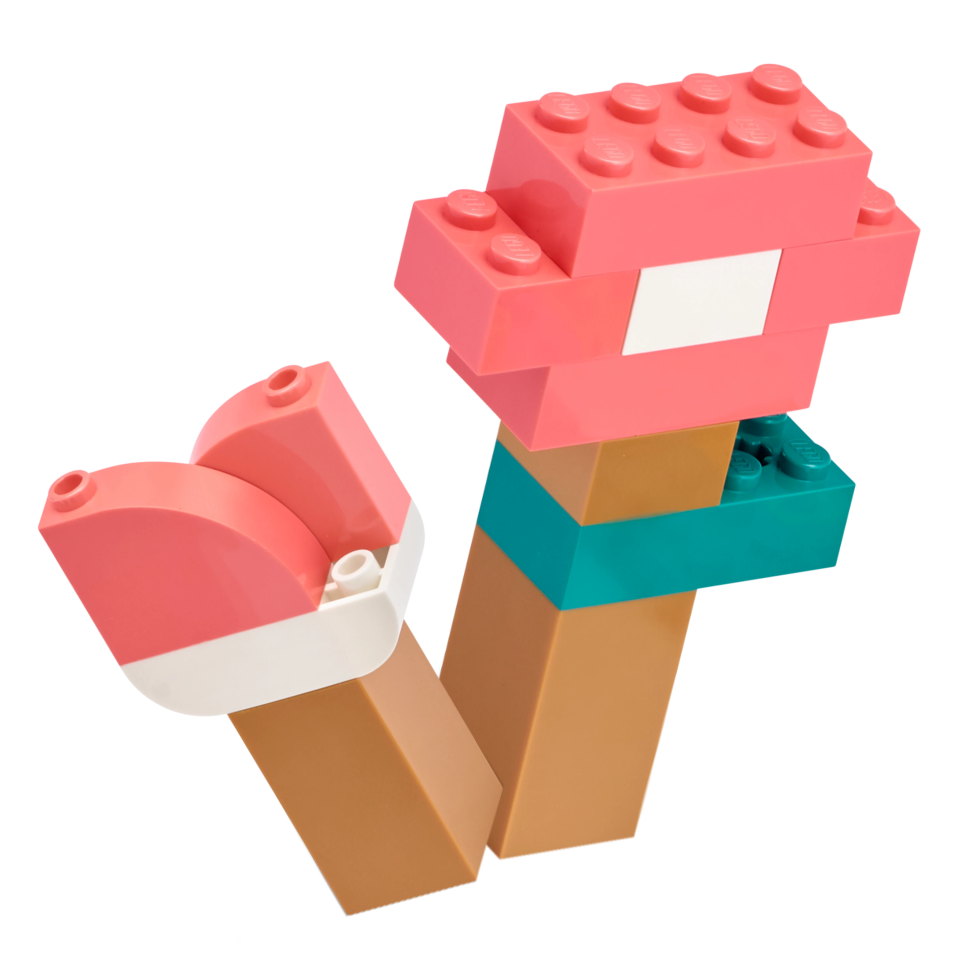
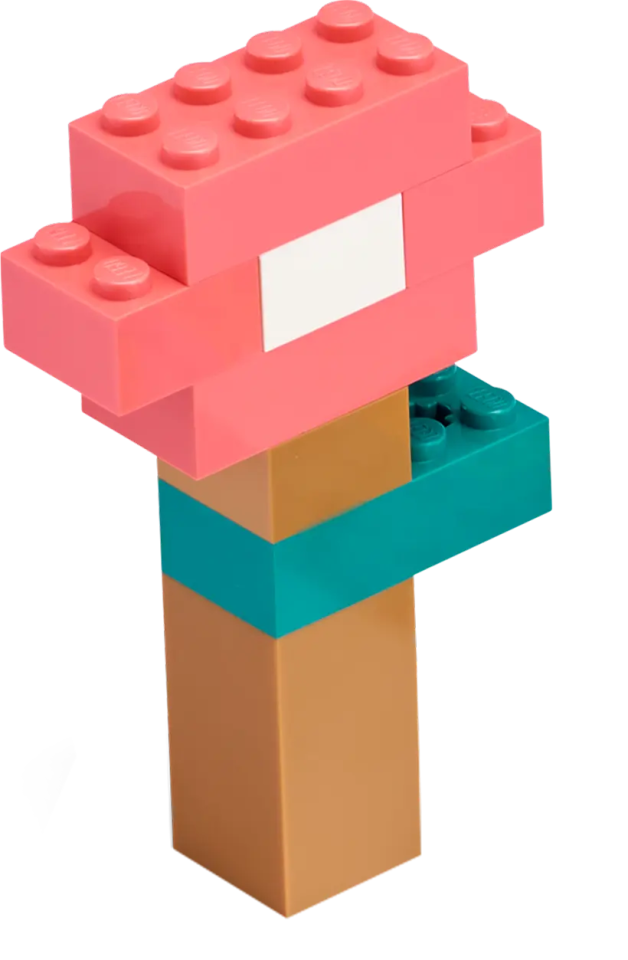
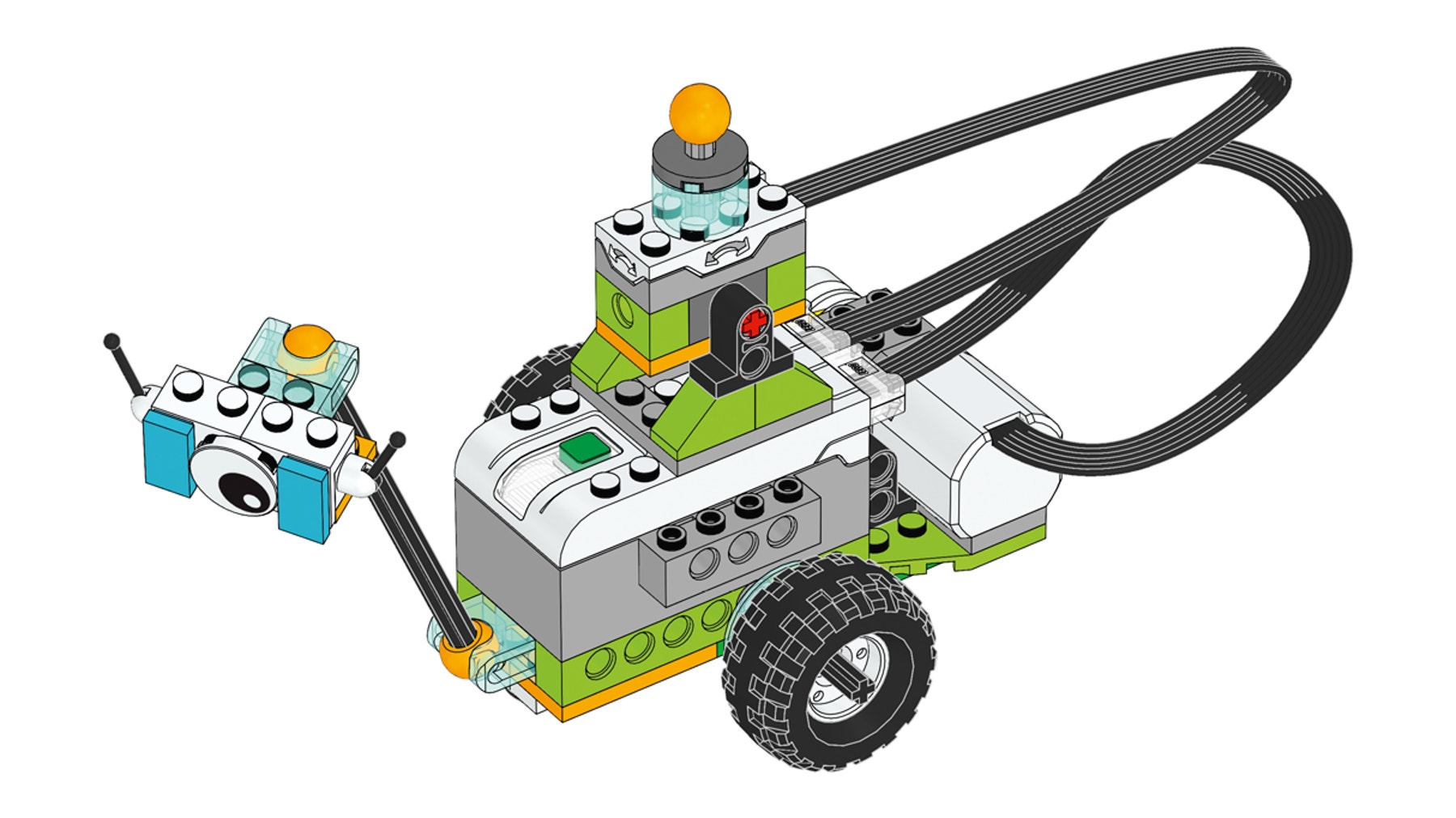
根据搭建指导,学生将会搭建一个可以运用倾斜传感器来将信息传回给基地的设备。
程序链将根据倾斜传感器检测到的倾斜角度度做出两个动作。
• 如果朝下倾斜,LED 红灯会亮起。
• 如果朝上倾斜,电脑设备上会出现信息。

4. 分享阶段
(5分钟)
在此基础实验中,让学生尝试为他们的程序截屏,并练习记录他们在实验中使用过的程序链。