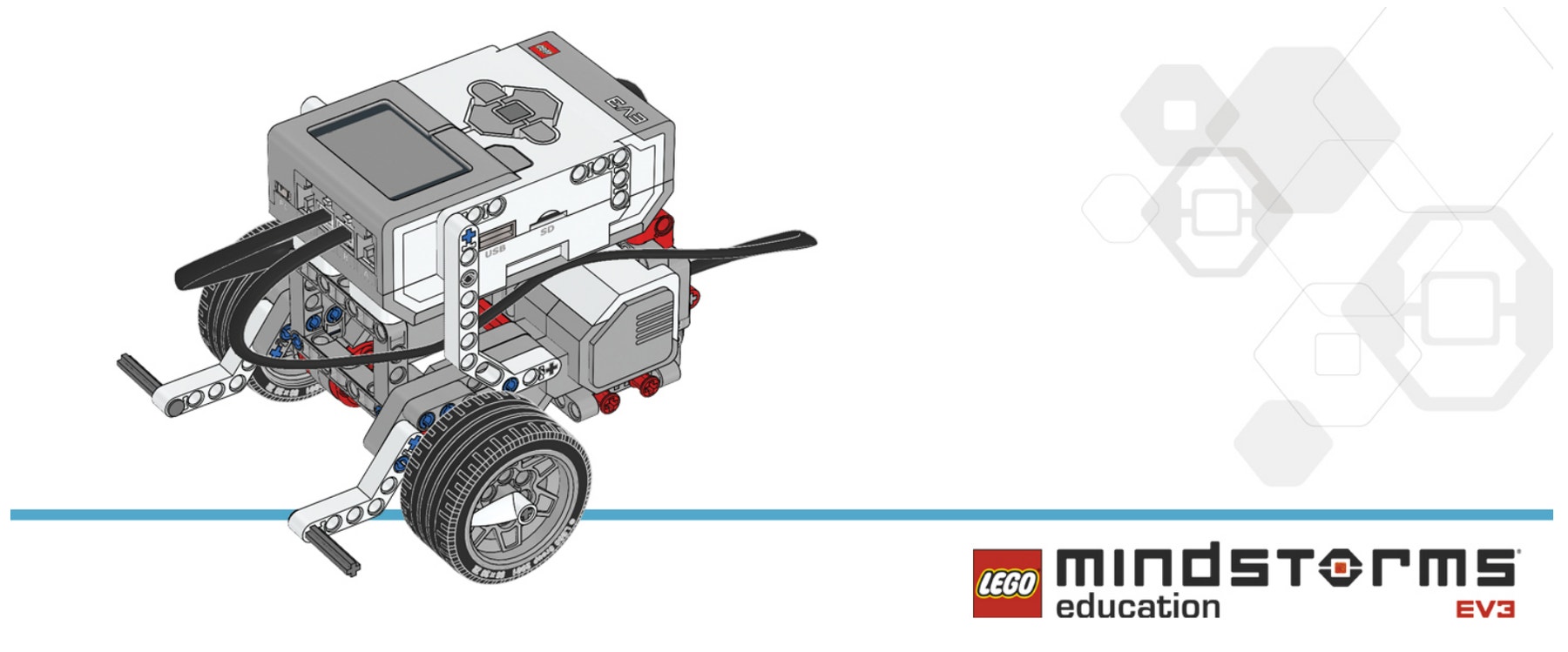
乐高MINDSTORMS头脑风暴EV3机器人核心套装
曲线移动
使用移动转向模块使驱动基座转向。
0-30 分钟
初级
6-8 年级
测试
重新创建显示的程序,然后下载并运行以进行测试。
已在画布上提供了示例程序 '01'。
提示
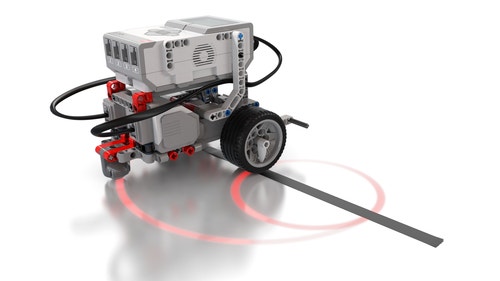
使用“滚轮指针”帮助了解电机与驱动基座旋转之间的关系。 学生通常假设 90 度的电机转动等于 90 度的驱动基座转向。
请注意,驱动轮之间的距离会影响转弯半径。

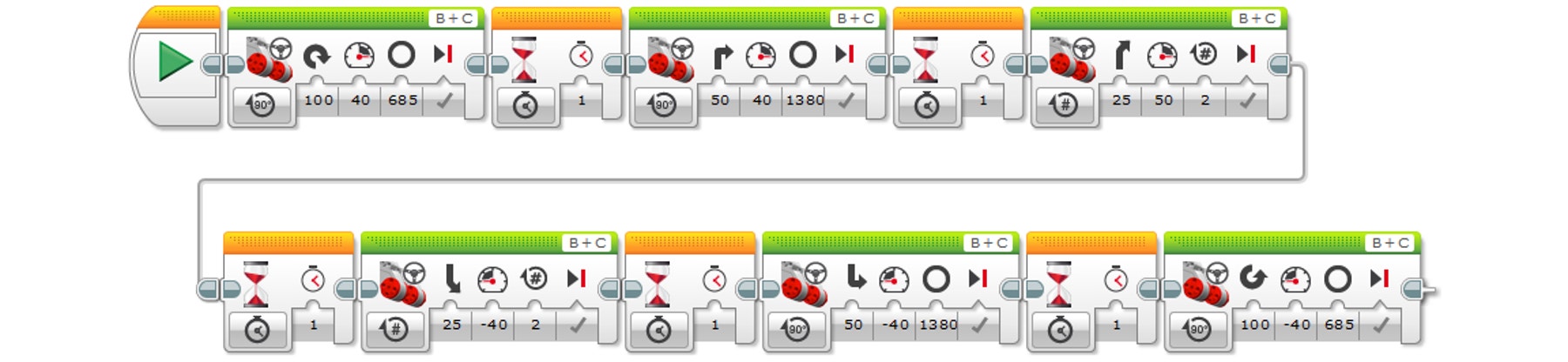
程序概述
开始
移动转向 – 度数 [685],转向 [100]
等待 – 时间 [1 秒]
移动转向 – 度数 [1380],转向 [50]
等待 – 时间 [1 秒]
移动转向 – 圈数 [2],转向 [25]
修改
现在轮到您了!将另外三个移动转向模块添加到
程序中,以便使驱动基座返回其起始位置。
已在画布上提供了示例程序 '02'。
下一步是什么?