使用传感器转向
任务是:使用陀螺仪传感器对机器人进行编程,以完成以某个精确角度为目标的点转向
循序渐进
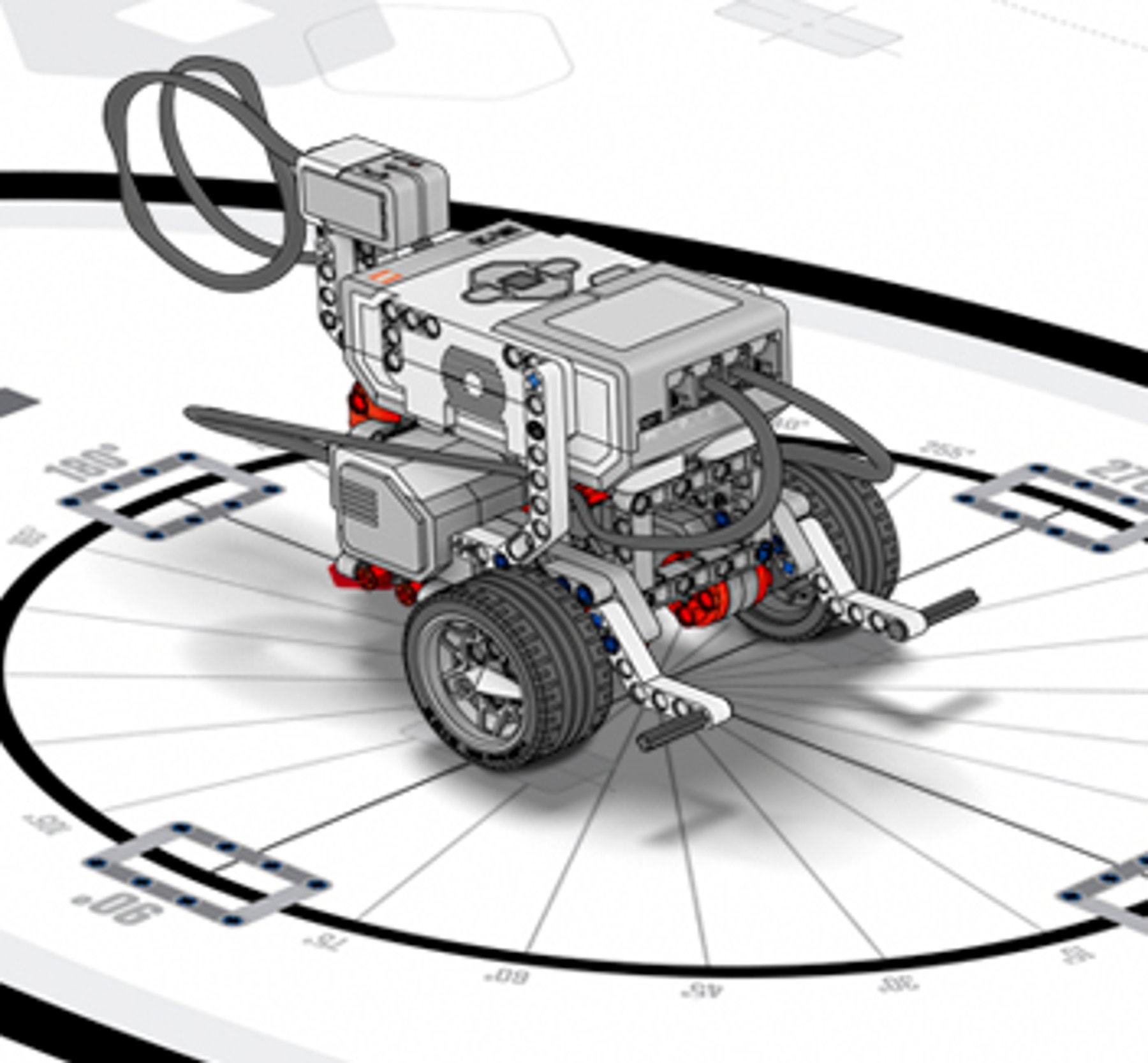
1.拼砌您的机器人。
2.创建您的程序。
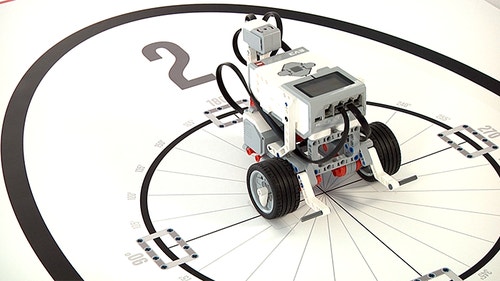
3.将机器人放在垫子 2 的位置 2 上,然后运行程序。
4.为发现的内容添加说明。
5.继续深入学习使用陀螺仪传感器控制机器人的移动。
开始此任务之前,可能需要查看以下这些 Robot Educator 教程:
- 在一定角度后停止
- 循环
在这一任务中,学生们将探索传感器输入与机器人行为之间的关系。驱动基座旋转将由陀螺仪传感器控制。
观察学生,确定学生们是否
使用正确的术语;
识别程序模块的功能;
找出测试机器人旋转角度的最佳方法;
识别在使用陀螺仪传感器时可能影响停止精度的因素(传感器容错 性、电机迟滞和旋转动量)。
联系
(5分钟 )
使用轮子进行转向并不是非常精确。如果尝试在有灰尘或者容易打滑的表面上将机器人转向,则机器人可能无法达到正确的角度。陀螺仪传感器的作用是帮助进行更加精确的移动。
任务是:使用陀螺仪��传感器对机器人进行编程,以完成以某个精确角度为目标的点转向。
建构
(20分钟 )
拼砌您的机器人
单击下面的链接打开拼砌说明,然后拼砌模型并返回此项目以继续。如果已经拼砌好了模型,可以跳过此步骤。
重要提示:
在连接电缆时以及在 EV3 程序块启动过程中,请保持陀螺仪传感器和 EV3 程序块处于稳定状态。
创建您的程序
重新创建显示的程序并将其下载到机器人中。

程序概述
开始
移动槽 - 功率 B [10],功率 C [-10]
等待 - 陀螺仪传感器 - 比较角度 - 类型 [3](大于或等于),度数 [90]移动槽 - 关闭
排除问题
角度需要调整 – 通常情况下,值需要小于 90 度。
理论
使用陀螺仪传感器时,传感器模块中写入的旋转值与驱动基座的旋转对应。传感器的精度为 +/- 3 度。
电机迟滞以及停止旋转动量所导致的延迟也可能影响精度。
电池容量、轮子大小、机器人与表面的摩擦力、两个轮子之间的距离这些因素不再影响机器人的旋转精度。
反思
(20分钟 )
运行程序并观察。
将机器人放在垫子 2 的起始位置 2 上,然后运行程序。
为发现的内容添加说明
描述每个程序部分使机器人执行的操作:
我的机器人...
估算机器人的旋转角度:
我的机器人转向了大约...
说明在有和没有陀螺仪传感器的情况下机器人转向的区别:
利用陀螺仪...
思考和修改
重新编写程序,让机器人执行以下点转向操作
1.顺时针转向 45 度
2.顺时针转向 180 度
3.顺时针转向 360 度,随后逆时针点转向 360 度
与程序指示机器人所旋转的角度相比,机器人旋转了多少度?
机器人旋转了...
任务
将机器人顺时针转向 45 度。

解决方案 - 程序概述
开始
移动槽 - 功率 B [10],功率 C [-10]
等待 - 陀螺仪传感器 - 比较角度 - 类型 [3](大于或等于),度数 [45]
移动槽 - 关闭
排除问题
角度需要调整 – 通常情况下,值需要小于 45 度。
任务
将机器人顺时针转向 180 度。

解决方案 - 程序概述
开始
移动槽 - 功率 B [10],功率 C [-10]
等待 - 陀螺仪传感器 - 比较角度 - 类型 [3](大于或等于),度数 [180]移动槽 - 关闭
排除问题
角度需要调整 – 通常情况下,值需要小于 180 度。
任务
将机器人顺时针转向 360 度,随后逆时针点转向 360 度

解决方案 - 程序概述
开始
移动槽 - 功率 B [10],功率 C [-10]
等待 - 陀螺仪传感器 - 比较角度 - 类型 [3](大于或等于),度数 [360]移动槽 - 关闭
等待 - 秒 [2]
移动槽 - 功率 B [10],功率 C [-10]
等待 - 陀螺仪传感器 - 比较角度 - 类型 [5](小于或等于),度数 [0]
移动槽 - 关闭
拓展
(15分钟 )
继续探索
使用循环创建一个新程序,让机器人沿正方形前进。
准备好之后,在学习垫 1 的起始位置 4 中测试程序。

解决方案 - 程序概述
开始
循环 - 计数 [4]
移动转向装置 - 度数 [682],功率 [30]
等待 - 时间 [1 秒]
移动槽 - 开启,功率 B [10],功率 C [-10]
等待 - 陀螺仪传感器 - 更改角度 - 方向 [0](增加),度数 [85]
移动槽 - 关闭
等待 - 时间 [1 秒]
排除问题
角度需要调整 – 通常情况下,值需要小于 90 度。
在此处说明循环的作用:
我可以使用循环结构来...
可选
任务 1
创建一个新程序,使机器人沿三角形前进。准备好之后,在垫子 1 的起始位置 4 中测试程序。
任务 2
对机器人编程,使其沿其他形状前进。
您现在能够使用陀螺仪传感器来进行转向。好样的!
教师支持
学生们将会学习:
科学和工程
• 图案
• 原因和影响:机制和解释
数学
• 解算涉及角度测量、面积、表面积和体积的实际和数学问题。
• 在反复推理中寻找并阐述规则性。
机器人方面的学习
• 使用陀螺仪传感器控制机器人的移动
• 了解普通输出编程与基于传感器的编程之间的区别
• 传感器的优势和局限性
乐高MINDSTORMS头脑风暴EV3机器人核心套装
EV3 软件或编程应用程序
EV3 机器人太空挑战套装