工厂机器人
设计扩展部分并将其搭建到驱动底座上,然后对驱动底座进行编程以完成两项任务。

课程计划
1.课前准备
- 浏览 EV3 课堂 App 应用程序中的学生学习材料。
- 收集有关自主型轮式机器人在工厂和仓库中所执行任务的信息。
- 本节课需要使用黑色胶带、记号笔、卷尺和大型物体来创建工厂路径。
- 建议学生在进行此任务之前先完成本单元的其它课程。
- 要完成本课程,学生必须搭建好驱动底座模型,大约需要 30 分钟。
- 如果没有两节连续式 (double-block) 课堂时间,可以通过多次完成此课程。
Part A
2.参与(10 分钟)
- 根据下面*发起一次讨论*部分的想法组织学生围绕本节课程展开一次讨论。
- 将所有学生分为两人一组。
3.探究(35 分钟)
- 让学生集思广益,扩展其驱动底座,以便它抓取长方体并将其释放在目标圆的圆心(即“卸货区”)。
- 鼓励他们创造多个原型,同时从搭建和编程方面进行探索。
- 给学生一些时间,让他们进行搭建并测试自己的解决方案。
Part B
4.解释(10 分钟)
- 围绕机器人在沿线前进和在大型物体前停止方面的关键功能,组织学生进行讨论。
5.拓展(35 分钟)
- 让学生集思广益,扩展他们的驱动底座,以使其沿线前进并停止在尽可能靠近大型物体的地方。
- 让学生继续搭建和改进机器人,直到他们准备好完成任务。
- 请记得预留整理时间。
6.评估
- 就每位学生的课堂表现提供反馈。
- 评估他们解决方案的创造力及小组合作的程度。
- 可借助所提供的评价准则来简化此环节。
发起一次讨论
在乐高®工厂中,自主型轮式机器人的一项任务是在不同工作站之间搬运箱子。这些完全自主型机器人甚至在电量不足时可以自己找到前往充电站的路径!它们能够高效执行任务,且不会撞到墙壁、人或其它机器人。

利用下列问题引导学生围绕驱动底座如何能够进行与乐高工厂机器人类似的任务展开一次讨论:
- 你认为驱动底座能够进行与乐高工厂机器人类似的任务吗?
- 前面课程中哪些扩展对进行这些任务有帮助?
项目概要
设计扩展部分并将其搭建到驱动底座上,然后对驱动底座进行编程以实现:
- 抓取长方体并尽可能将其搬运到目标圆的圆心,然后释放它。
- 检测线路并沿线前进,还要尽可能靠近大型物体,而不接触它。
搭建要诀
开放式解决方案
本项目旨在让每位学生或每个小组找到独特的解决方案。利用下列问题引导各组进行头脑风暴,以解决项目概要中的任务:
- 机器人是如何到达卸货区中心位置?
- 机器人又是如何能够停止在尽可能靠近大型物体的地方?
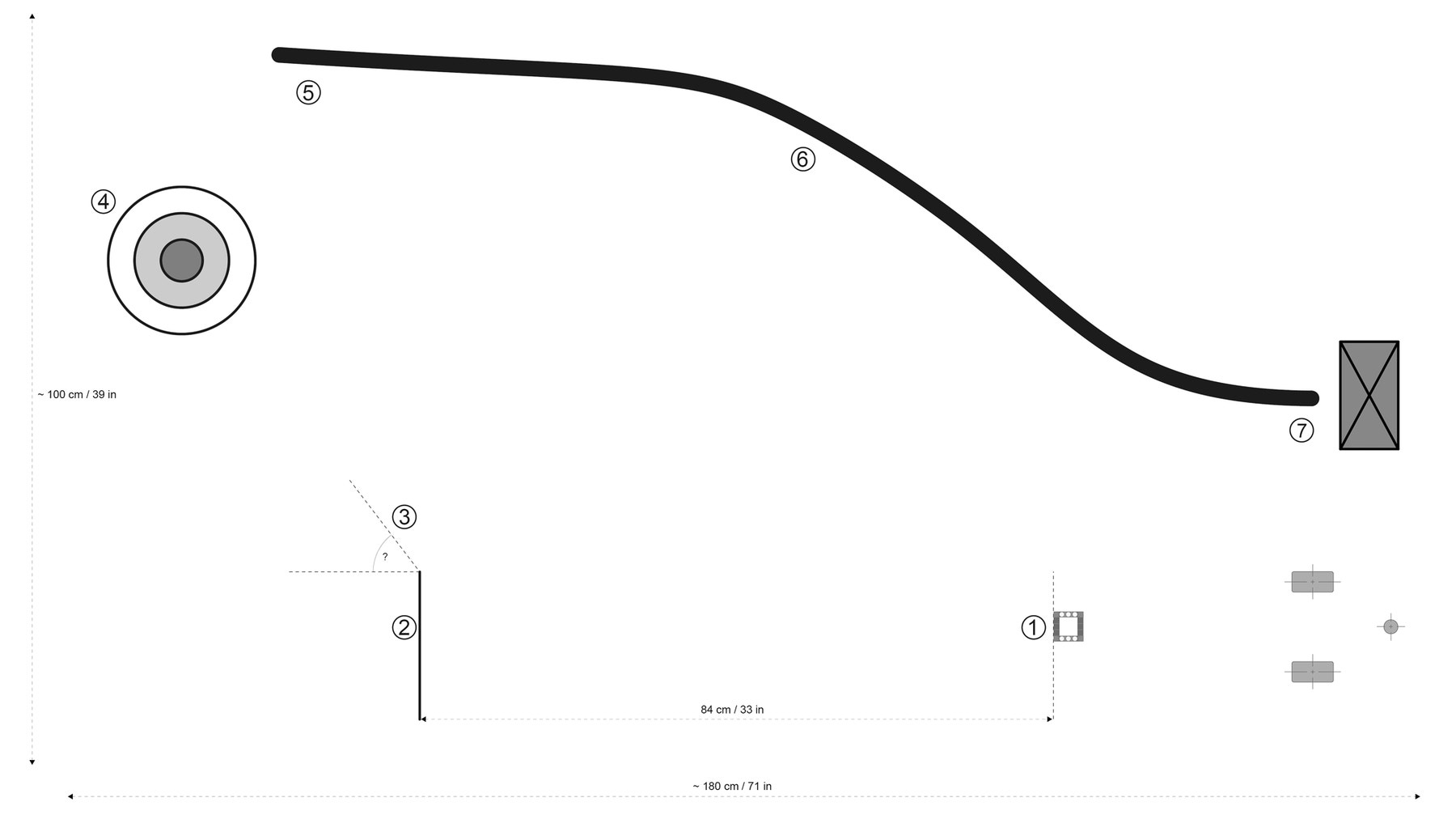
准备工厂路径
如想创建下图所示的的路径,学生需要用到胶带、记号笔、卷尺、长方体以及放置在黑色线路末端的大型物体。我们给出的测量结果仅作为参考,无需严格遵循,但示例解决方案及程序均基于这些测量结果。
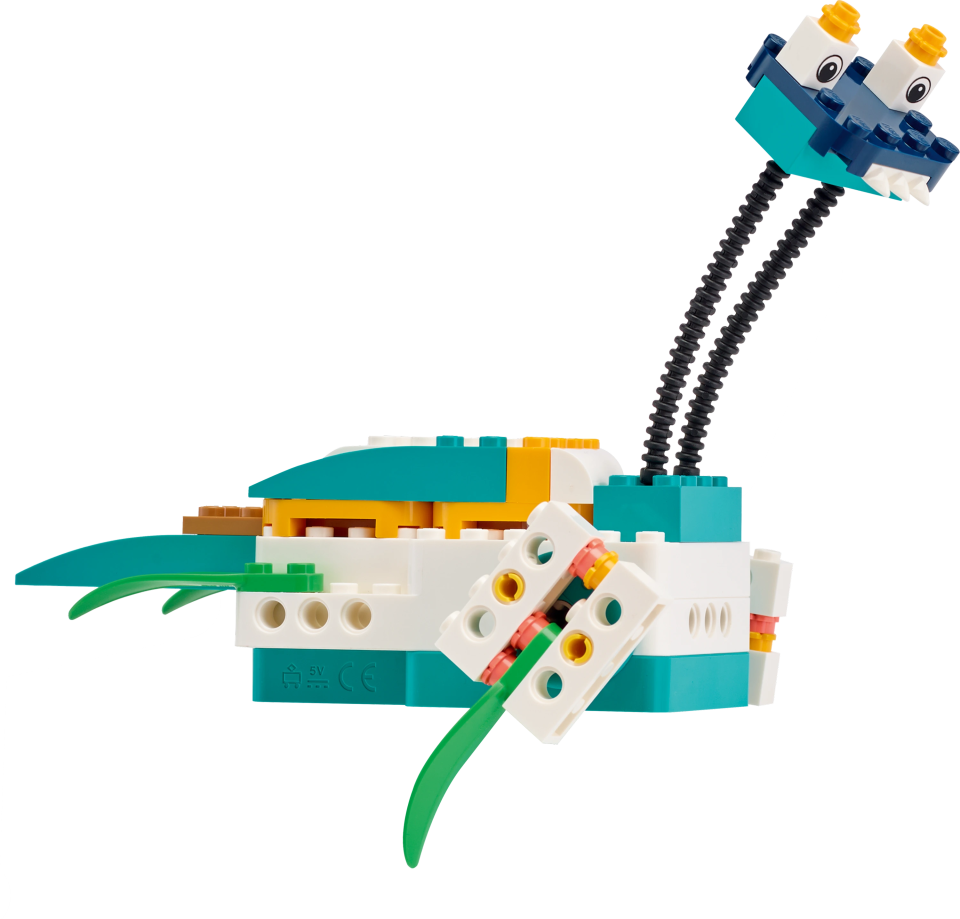
示例解决方案
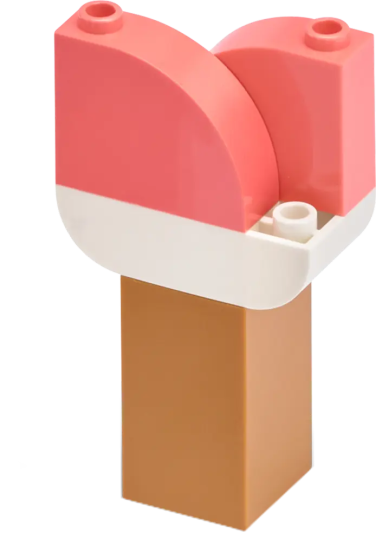
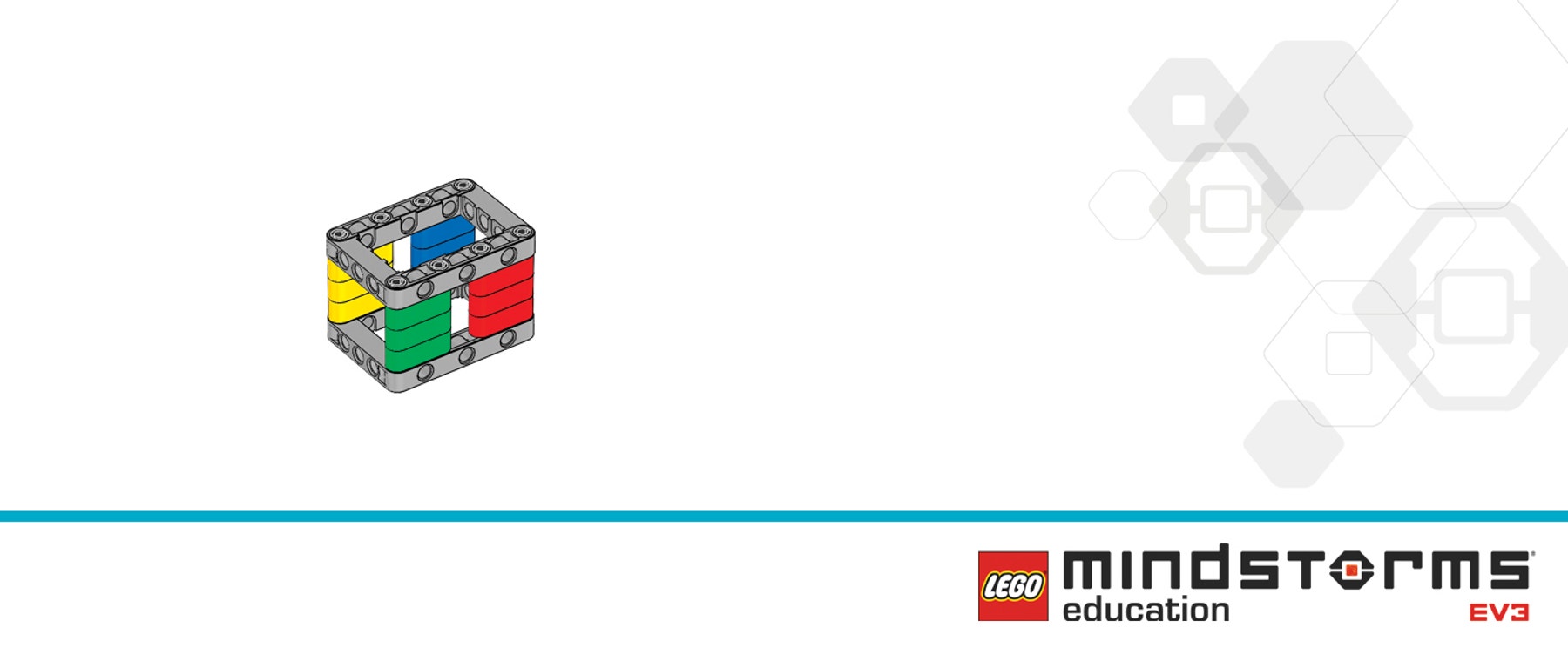
示例解决方案结合了以下扩展部分:
陀螺仪传感器使用
陀螺仪传感器在插入 EV3 程序块及 EV3 程序块启动期间必须保持完全静止。如果在驱动底座保持静止的情况下陀螺仪传感器的角度读数发生变化,请拔下传感器的插头,然后重新插入。
编程要诀
解决方案程序

分层教学
通过如下方式简化本节课:
- 与学生合作,帮助他们找到当检测到大型物体时停止沿线前进的方法
- 建议学生复习本单元的前几节课
- 允许学生通过不沿线前进的方式驶向大型物体
- 鼓励学生相互学习和交流
通过如下方式提高学生的学习水平:
- 向学生提出挑战,让他们拾取长方体后向前精确行驶 84 厘米,然后使用陀螺仪传感器将机器人引导至目标圆
- 使用与*颜色和线路*课程中不同颜色的胶带
评估环节
教师观察清单
可根据教学需要创设评价准则,例如:
1.部分完成
2.全部完成
3.超额完成
请使用下列成功完成任务的标准来评估学生的进度:
- 学生能够设计一个符合项目概要要求的机器人。
- 学生能够提出富有创意的解决方案,并考虑了多种解决方案。
- 学生能够作为一个团队一起完成任务。
自我评估
让每位学生选择最能代表自己当前水平的等级。
- 铜章:能够尽全力克服困难。
- 银章:虽然过程中发生了几起事故,但完成了其中一项任务。
- 金章:能够以优异成绩完成这两项任务。
- 铂金章:不仅能够完成这两项任务,而且能够添加有效且富有创意的功能。
语言艺术拓展
整合语言艺术能力培养,请让学生:
- 创设一个演示文稿或视频,其中要突出机器人的特点和性能
- 创设一个演示文稿,解释他们程序的一些重要功能
备注:这部分内容可用作拓展课程。
职业连接
喜欢这节课的学生可能会对以下相关行业产生兴趣:
- 信息技术(计算机编程)
- 制造与工程(工程预科)
- 科学、技术、工程、数学(工程与技术)
教师支持
学生将会:
- 展示他们完成任务的能力
乐高®教育 MINDSTORMS® 头脑风暴 EV3 机器人核心套装
EV3 课堂 App 应用程序
黑色胶带
记号笔
卷尺
大型物体
量角器(可选)
中华人民共和国教育部
中小学综合实践活动课程指导纲要
设计制作活动(信息技术)(8年级)
主题10.开源机器人初体验
通过常见的电子模块,用3D打印或者激光切割等方式自制各种结构件,结合开源硬件,设计有行动能力的机器人。