爬坡
对一个机器人进行设计、拼砌和编程,该机器人可以使自己爬上尽可能陡峭的斜坡。

联系
(30分钟)
使用此视频可:
- 将学生与可移动的实际机器人联系起来;
- 将学生与物理科学和数学原理联系起来:距离、速度、能量和动力系统;平衡、稳定性和质心;移动图案和坐标系;能量传递;坡度斜率和针对机器人移动的其他挑战;
- 考虑机器人如何思考:它们如何知道所处位置及需要执行的操作;
- 启发学生创建自己的可移动的机器人。
“让它动起来”讨论
- 了解机器和机器人不使用轮子进行移动的方式。选择一个示例,跟踪移动如何从一个部分传递到另一个部分。
此问题可让学生面对挑战,让他们观察并描述:机器人实际上如何移动以及如何使用物理科学词汇(如功率、能量、功、质心和稳定性)。 - 比较两个行走机器人的移动方式。关于它们在行走时的平衡方式,您注意到了哪几点?
ZI 昆虫机器人抬起一侧的一条腿,但不抬起另一侧的腿。类人机器人通过各种方式保持其平衡(例如,缓慢移动、调整脚的位置、向侧面伸出和缩回手)。
设计纲要
对一个机器人进行设计、拼砌和编程,该机器人可以使自己爬上尽可能陡峭的斜坡。
头脑风暴
鼓励学生积极参与头脑风暴流程,以便加深其概念和理解。例如,鼓励学生:
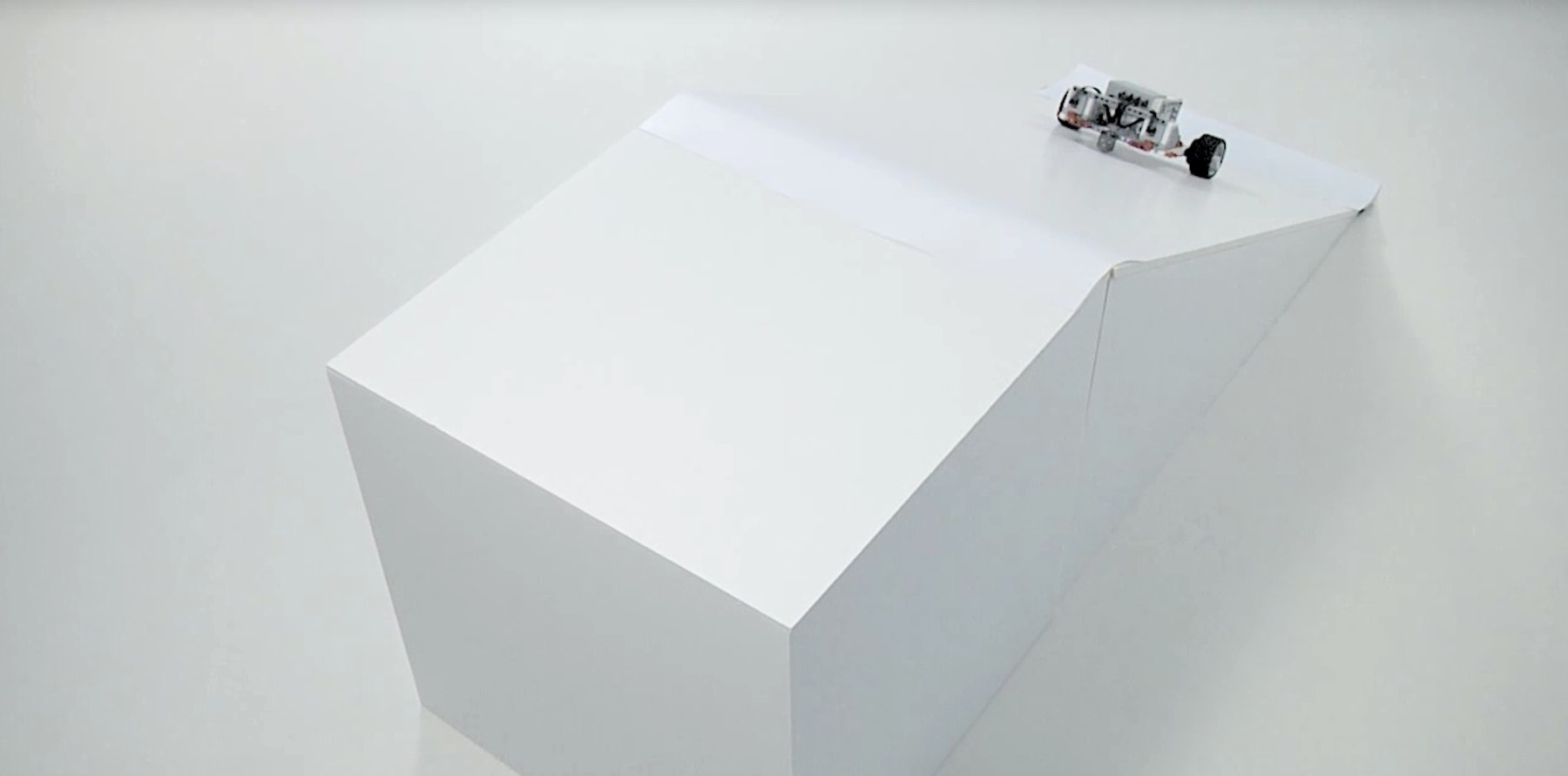
- 观看用于展示机器人的“正在运行的机器人”视频以获得灵感;
- 使用其中包括的拼砌和编程构思来研究“关键概念测量距离”和“测量速度”项目,尤其是使用齿轮的示例;
- 通过拼砌构思拼砌建议的示例并探究其工作原理;
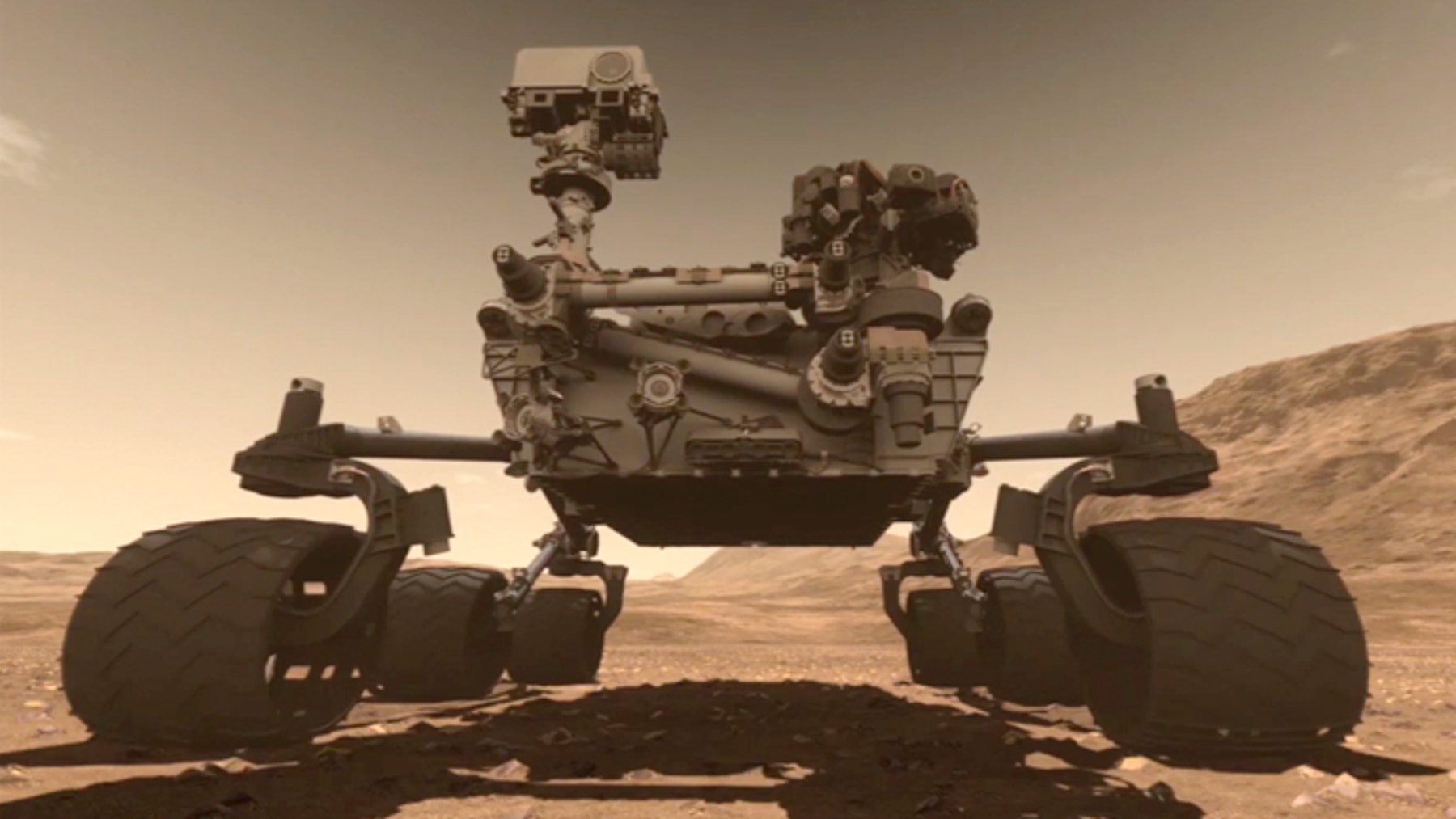
- 个性化其机器人或描述爬上斜坡的机器人可发挥重要作用的环境(例如,请注意“让它动起来”视频中在斜坡上测试的 NASA 火星好奇号巡游车)。
请参见以下拼砌构思:
选择最佳解决方案
描述同意进行拼砌和编程的解决方案。
通过头脑风暴讨论,对示例进行思考。然后解释针对设计纲要选择此解决方案的原因。鼓励学生描述选择此解决方案的原因。这样,当学生进行检查和修正时,他们将掌握一些特定信息用于评估其解决方案并决定是否有效。
构建
(30分钟)
拼砌和编程
现在您已准备好开始对解决方案进行拼砌和编程!
从事解决方案工作时,使用此日志页面可:
1.描述效果特别好的一个设计部分。
2.描述必须进行的一个设计更改。
3.下一步要尝试的内容
在测试设计解决方案时,使用后两页的表格收集和记录调查结果。
思考
(30分钟)
测试和分析
解决方案对设计纲要的符合程度如何?使用此页面可记录数据。命名列和行,如 “试验数字”、 “倾斜角度”、 “齿轮齿数比”、 “电机功率”、“时间” 和 “观察内容”。
检查和修正
考虑以下几点:
- 机器人是轻松还是费劲地爬上斜坡?
- 是否测试了各种设置以优化电机功率?
- 他人通过哪些方式解决了此问题
鼓励学生回顾设计纲要以及自己的头脑风暴笔记和测试数据。 鼓励进行同行检查流程,以便每个小组负责评估自己和他人的项目。此检查流程可以帮助学生培养在提供建设性反馈方面的技能以及加强分析技能和使用客观数据支持论点。
交流
下面是一些向学生进行建议的想法:
- 创建项目的视频,尤其是最终展示和机器人性能;
- 解释软件程序的一些重要功能;
- 通过在解构时拍摄一系列照片,来建立模型的拼砌指南;
- 包含带备注的程序图像;
- 添加团队照片!
拓展
(30分钟)
交流
下面是一些向学生进行建议的想法:
- 创建项目的视频,尤其是最终展示和机器人性能;
- 解释软件程序的一些重要功能;
- 通过在解构时拍摄一系列照片,来建立模型的拼砌指南;
- 包含带备注的程序图像;
- 添加团队照片!
教师支持
学生将:
• 对自己机器人进行拼砌和编程,使其爬上尽可能陡峭的斜坡;
• 了解可以使用机械和电气功率改变机器的速度和功率;
• 了解可以按斜率测量坡度。
乐高MINDSTORMS头脑风暴EV3机器人核心套装
EV3 软件或编程应用程序
前提条件
学生应了解如何创建和下载程序以及如何对电机进行编程。