工厂机器人
在乐高^®^工厂中,自主机器人能够执行多项任务。


它们的其中一项任务是在不同工作站之间搬运箱子。它们甚至在电量不足时可以自己找到前往充电站的路径!它们能够高效执行任务,且不会撞到墙壁、人或其它机器人。
你认为驱动底座可以用来执行类似的任务吗?
这里有一项挑战!
设计扩展部分并将其搭建到驱动底座上,然后对驱动底座进行编程以实现:
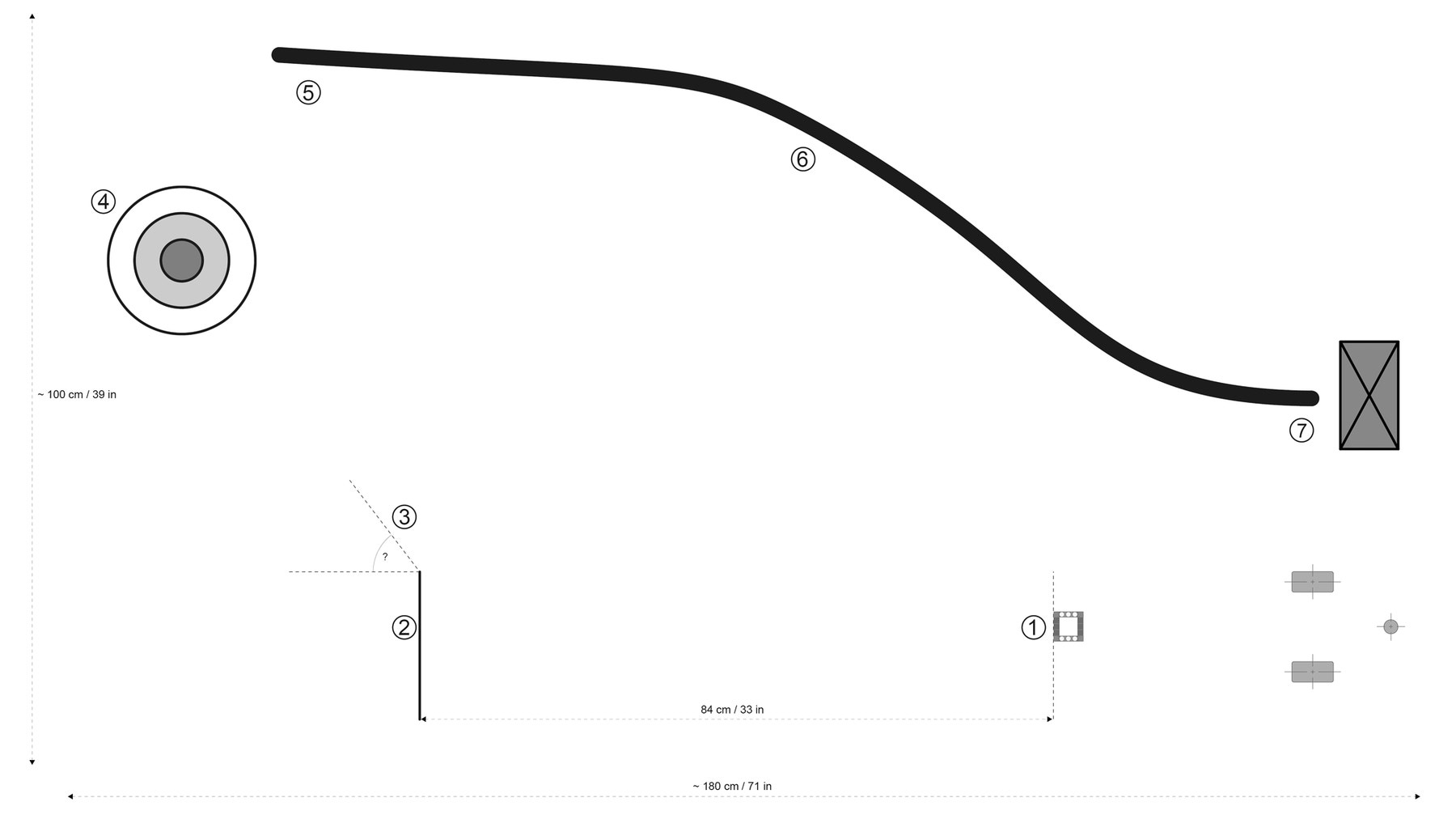
- 抓取长方体并尽可能将其搬运到卸货区中心位置,然后释放它。
- 检测线路并沿线前进至充电站,还要尽可能靠近大型物体,而不接触它。
将包裹送至卸货区。

进行头脑风暴获取想法,并准备机器人,直到你准备好测试自己的解决方案:抓取长方体并将其送至卸货区中心位置。
头脑风暴提示
你可以将主要任务拆分为较小的子任务,并围绕如下问题进行头脑风暴:
- 机器人如何抓取长方体?
- 机器人如何到达卸货区中心置?
- 前面课程中哪些扩展部分对完成此任务有帮助?
沿线前进驶向充电站。
进行头脑风暴获取想法,并准备机器人,直到你准备好测试自己的解决方案:沿线前进驶向充电站,然后恰好停在大型物体前。
头脑风暴提示
你可以将主要任务拆分为较小的子任务,并围绕如下问题进行头脑风暴:
- 机器人如何检测线路并沿线前进?
- 机器人如何能够停止在尽可能靠近大型物体的地方?
- 前面课程中哪些扩展部分对完成此任务有帮助?
完成任务。

将机器人放置在起始位置,并查看它能否:
- 抓取长方体并将其送至卸货区中心位置
- 沿线前进驶向充电站
你是怎样做到的?
哪些方面做得不错?哪些方面还有进步空间?
太棒了!你已经掌握了驱动底座,并准备好部署到工厂了!