角度与图案
驱动底座使用电机编码器进行转向。

驱动底座工作正常,但每次工厂地面被清洁后,驱动底座的车轮会打滑,这会使它迷失方向。可以使用陀螺仪传感器帮助驱动底座确定方向,以确保其正常运行。
在哪些情况下,检测方向变化以使机器人具备导航能力会很有用?
搭建此扩展部分。
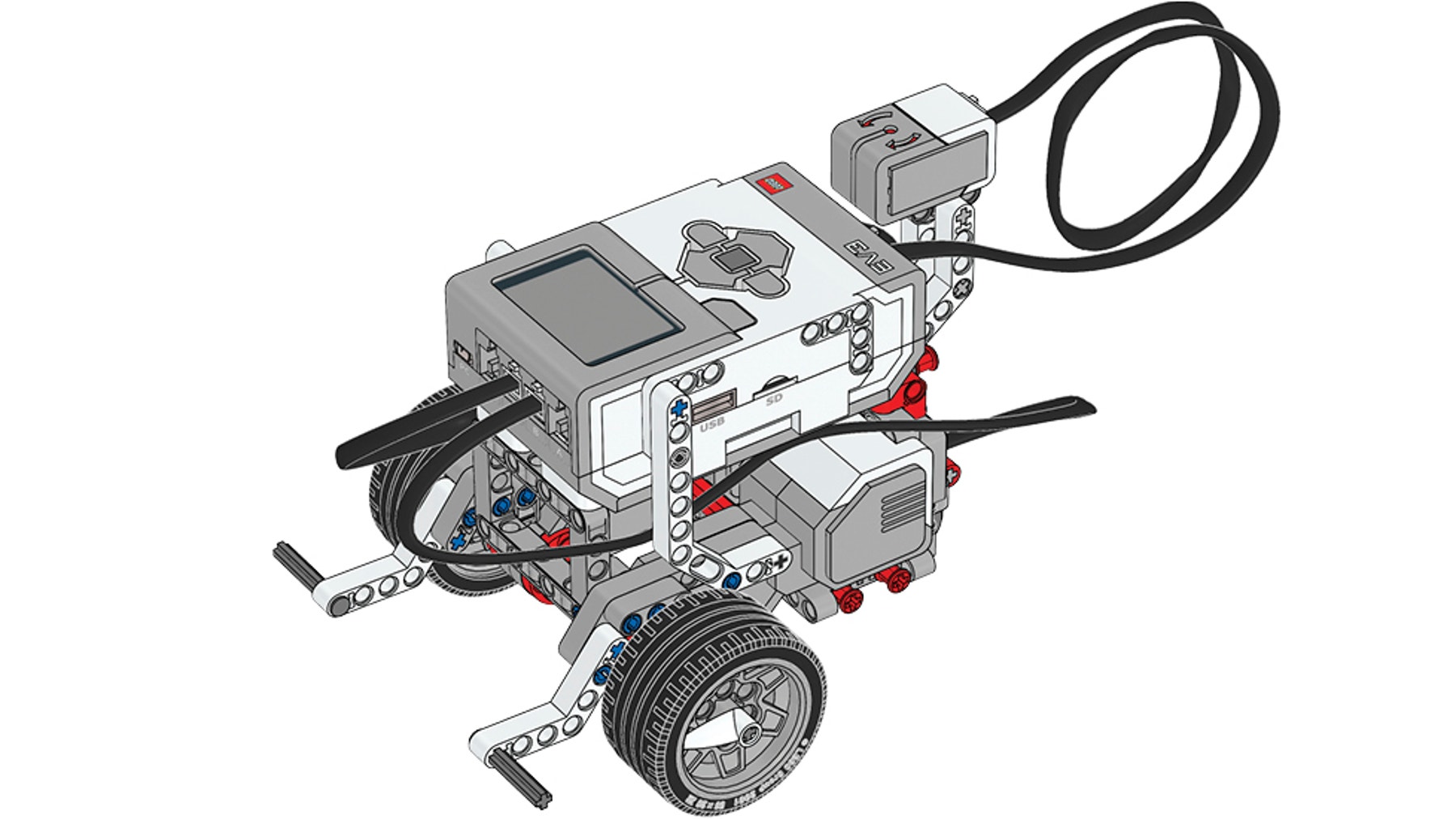
陀螺仪传感器扩展部分可用于沿着精心规划的路径精确导航。然后再将其搭建到驱动底座上。
请逐一尝试这些程序堆。


能发现些什么吗?
如何使用“我的模块”来组织和重用代码?
该你了!

使用编程界面上已有程序堆中的模块创建一个程序,使驱动底座旋转 90 度,然后向前行驶,最后沿指定图案前进。
是时候接受挑战了!

使用陀螺仪传感器和“我的模块”对驱动底座进行编程,使其沿正方形行驶三次,然后沿三角形行驶。
你是怎样做到的?
哪些方面做得不错?哪些方面还有进步空间?
太棒了!你的程序整理得井井有条!