抓放物体
我们需要一些电动工具。
电动工具可以拼装到机器人上,使其能够执行不同的任务。现在需要为工作寻找适宜的工具了!
为了移动物体,你的驱动底座都需要什么电动工具呢?
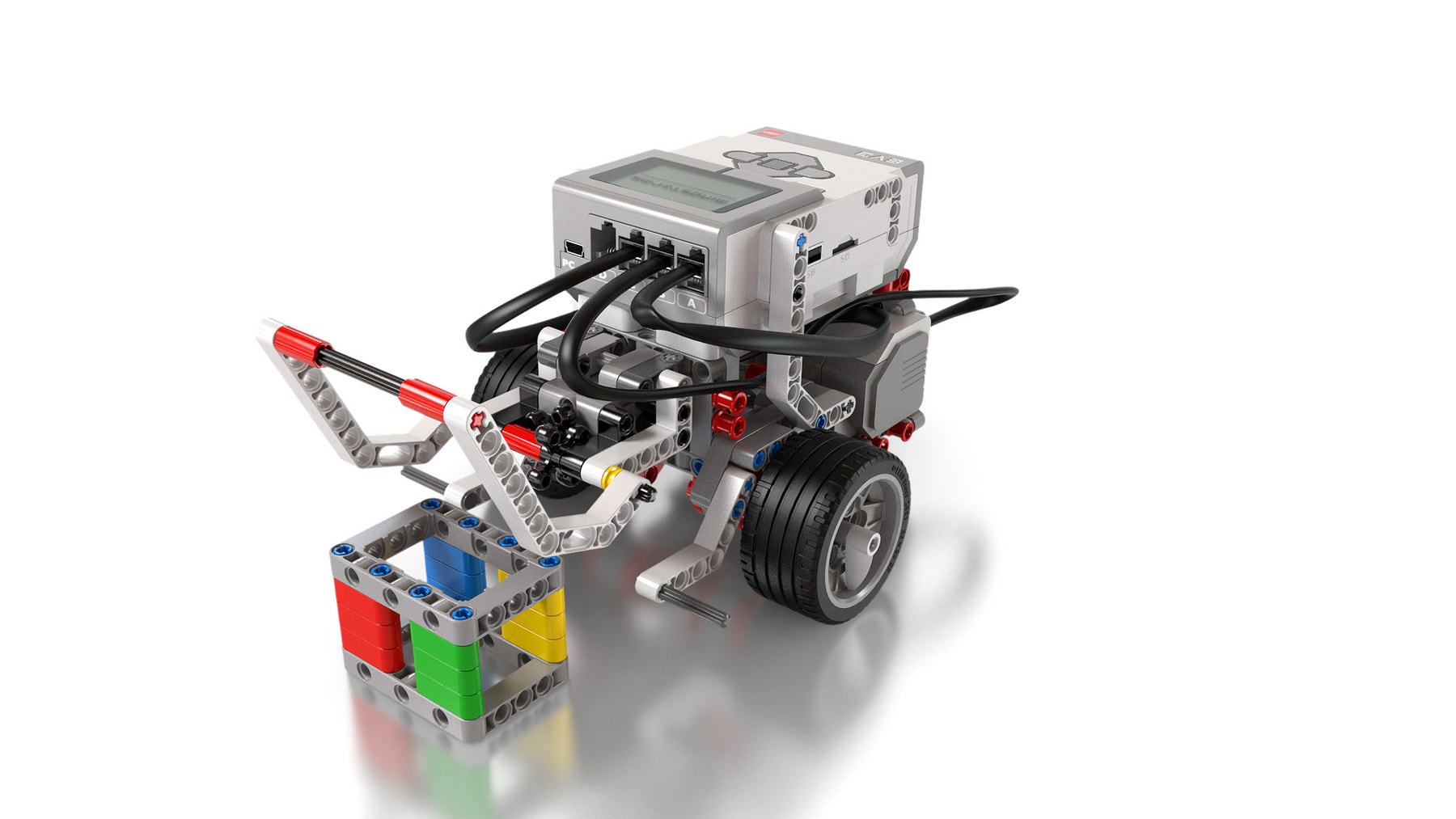
搭建长方体和扩展部分。
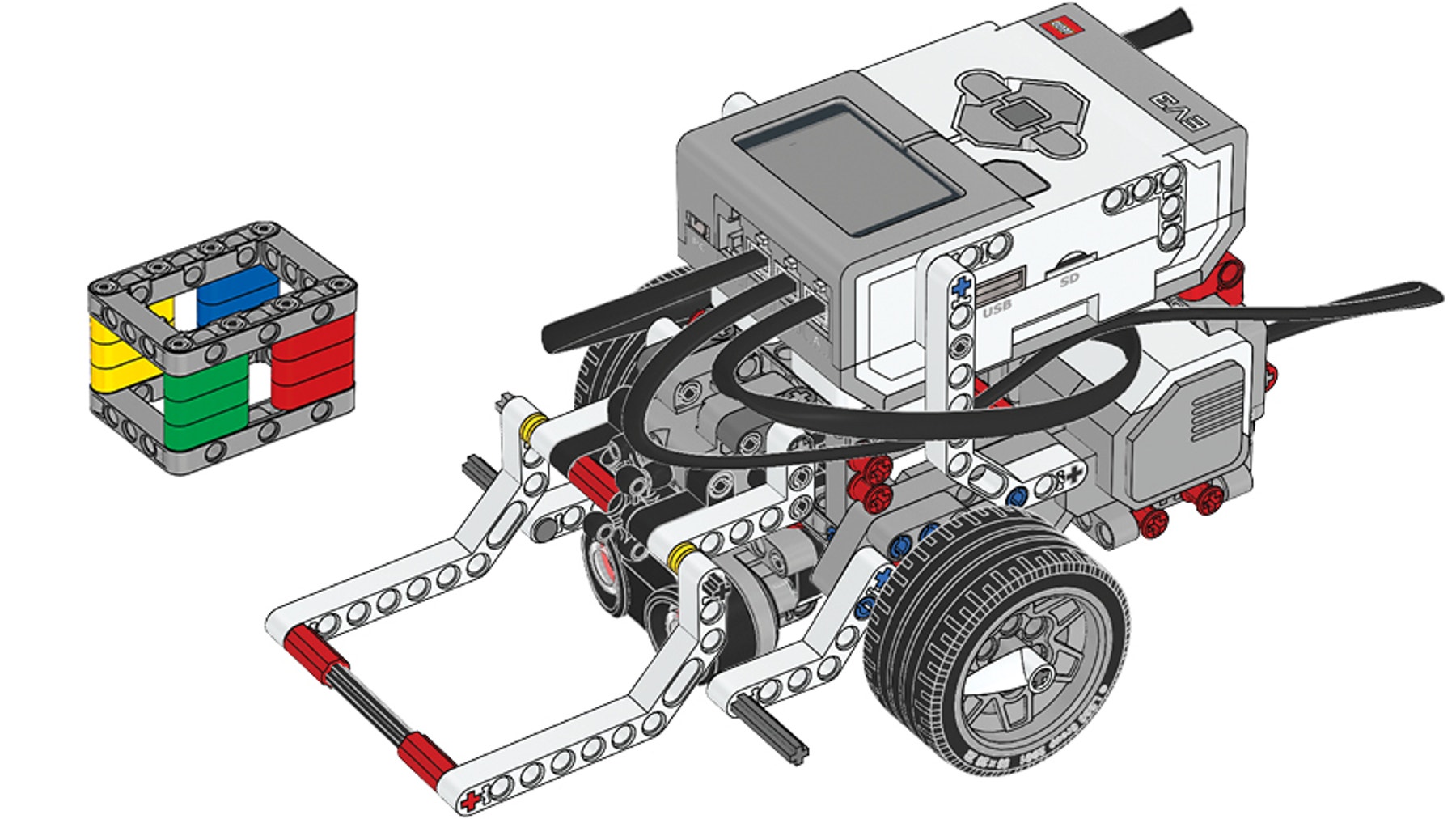
我们将使用中型电机扩展部分来抓取和释放长方体。你还需要上一节课中的超声波传感器扩展部分。搭建长方体,然后在驱动底座上搭建扩展部分。
请逐一尝试这些程序堆。

能发现些什么吗?尝试将长方体放置在不同的位置。
中型电机扩展部分的主要功能和局限性是什么?
该你了!
使用编程界面上已有程序堆中的模块创建一个程序,使驱动底座抓住长方体,然后向前行驶一定圈数,释放长方体,并向后行驶,返回其起始位置。
是时候接受挑战了!

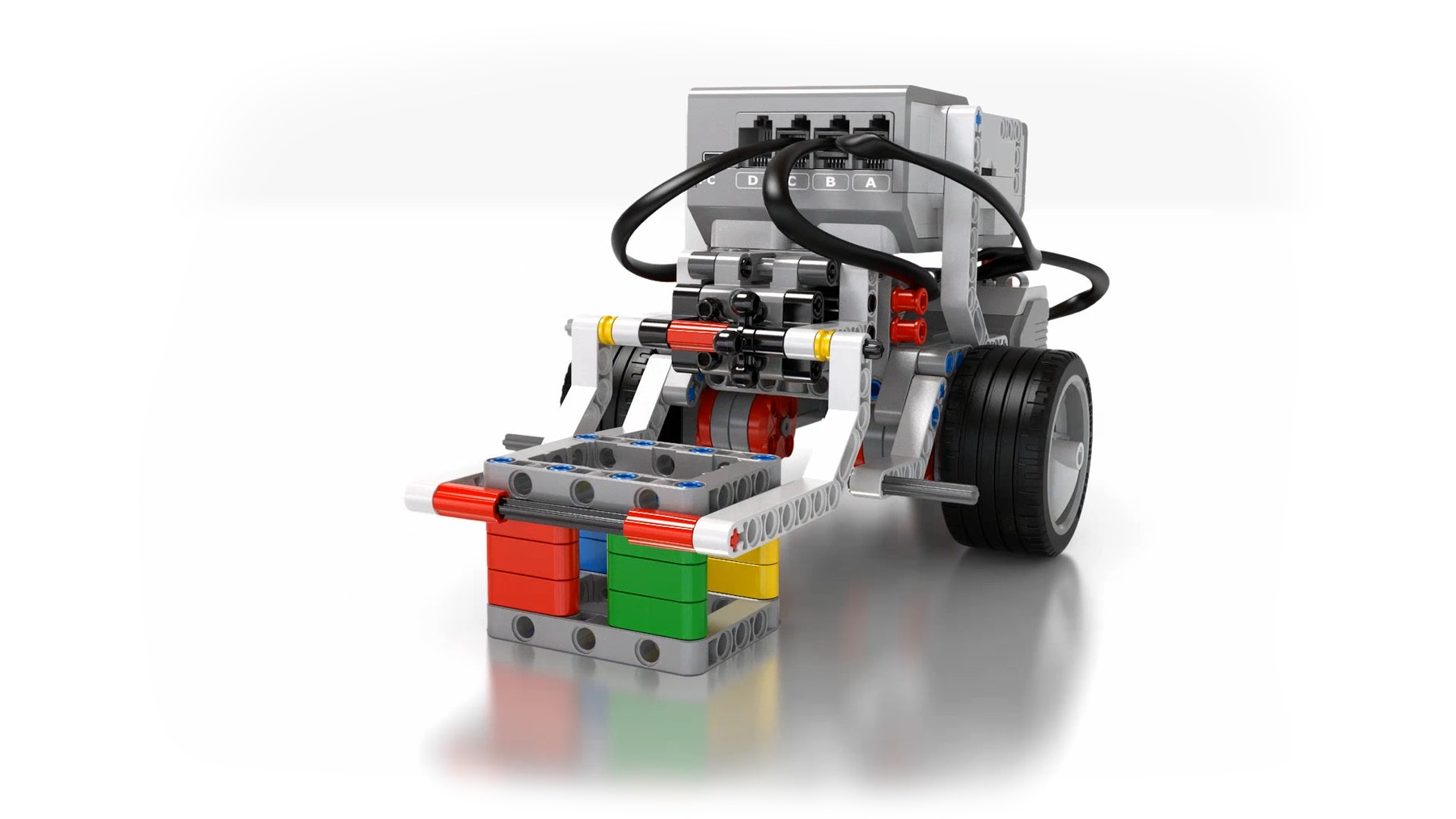
对驱动底座进行编程,以借助超声波传感器使其停在长方体附近,然后降低手臂拾取长方体并将其送回起始位置。
你是怎样做到的?
哪些方面做得不错?哪些方面还有进步空间?
你已经掌握这些技能了!你能够抓取和释放物体,将它们移动到任何所需的位置。