物体和障碍物
驱动底座是一个模块化的机器人平台。
可以根据需要进行扩展和重新配置。添加传感器可以使它对周围环境做出反应,这样它就能够执行诸如检测障碍物和避免碰撞之类的操作。
你知道哪些机器人能够检测物体吗?
搭建长方体和扩展部分。
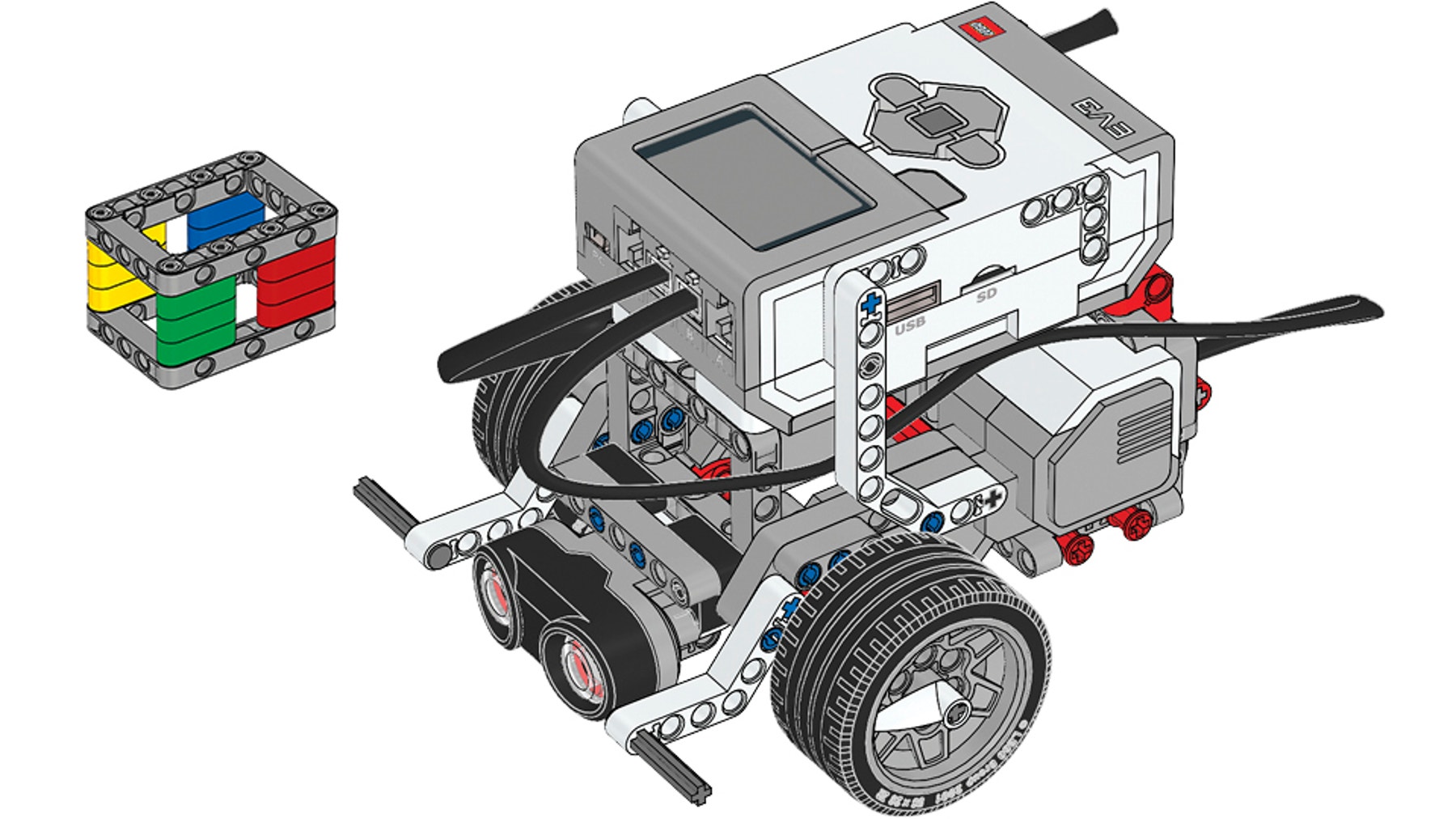
你需要超声波传感器扩展部分,以检测物体和障碍物。搭建长方体,然后在驱动底座上搭建扩展部分。
请逐一尝试这些程序堆。

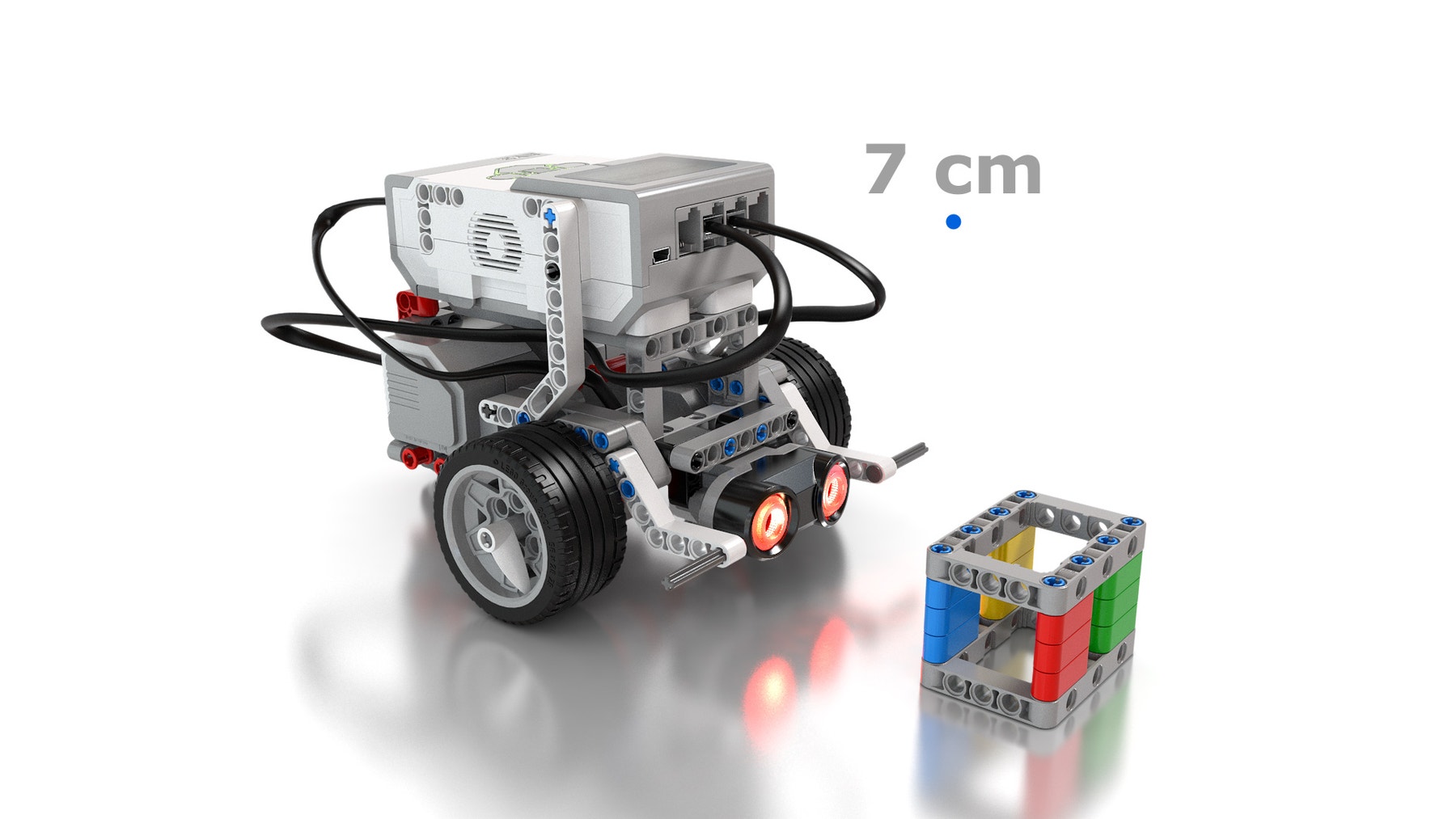
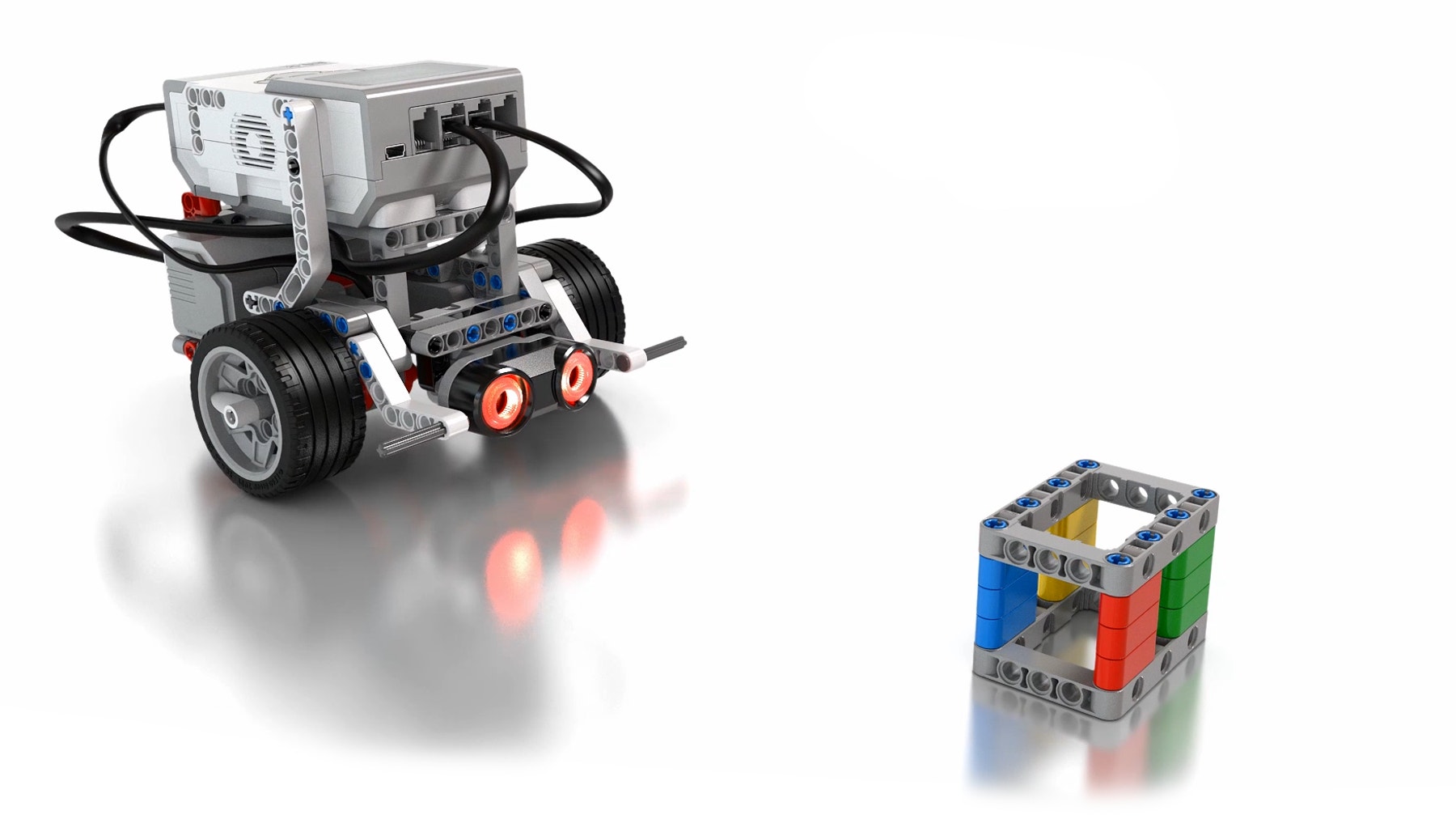
能发现些什么吗?尝试将长方体放置在不同的位置。
在什么情况下,你可以使用超声波传感器测量距离?
该你了!

使用编程界面上已有程序堆中的模块创建一个程序,实现对到长方体的两段不同距离做出反应。
是时候接受挑战了!
对驱动底座进行编程,实现当驱动底座靠近长方体时,能够发出更快或更响亮的警笛声。
你是怎样做到的?
哪些方面做得不错?哪些方面还有进步空间?
安全第一!现在,你已经能够检测路径中的障碍并对其做出反应。