试错
那怎样才能做到最好?
没有任何一台机器是完美的。尽管工程师们尽最大努力使机器尽可能精准,但总会存在一定程度的差错。
哪些因素决定了可接受的误差量?
搭建这个*斜坡机器人 (Bevel Bot)*。
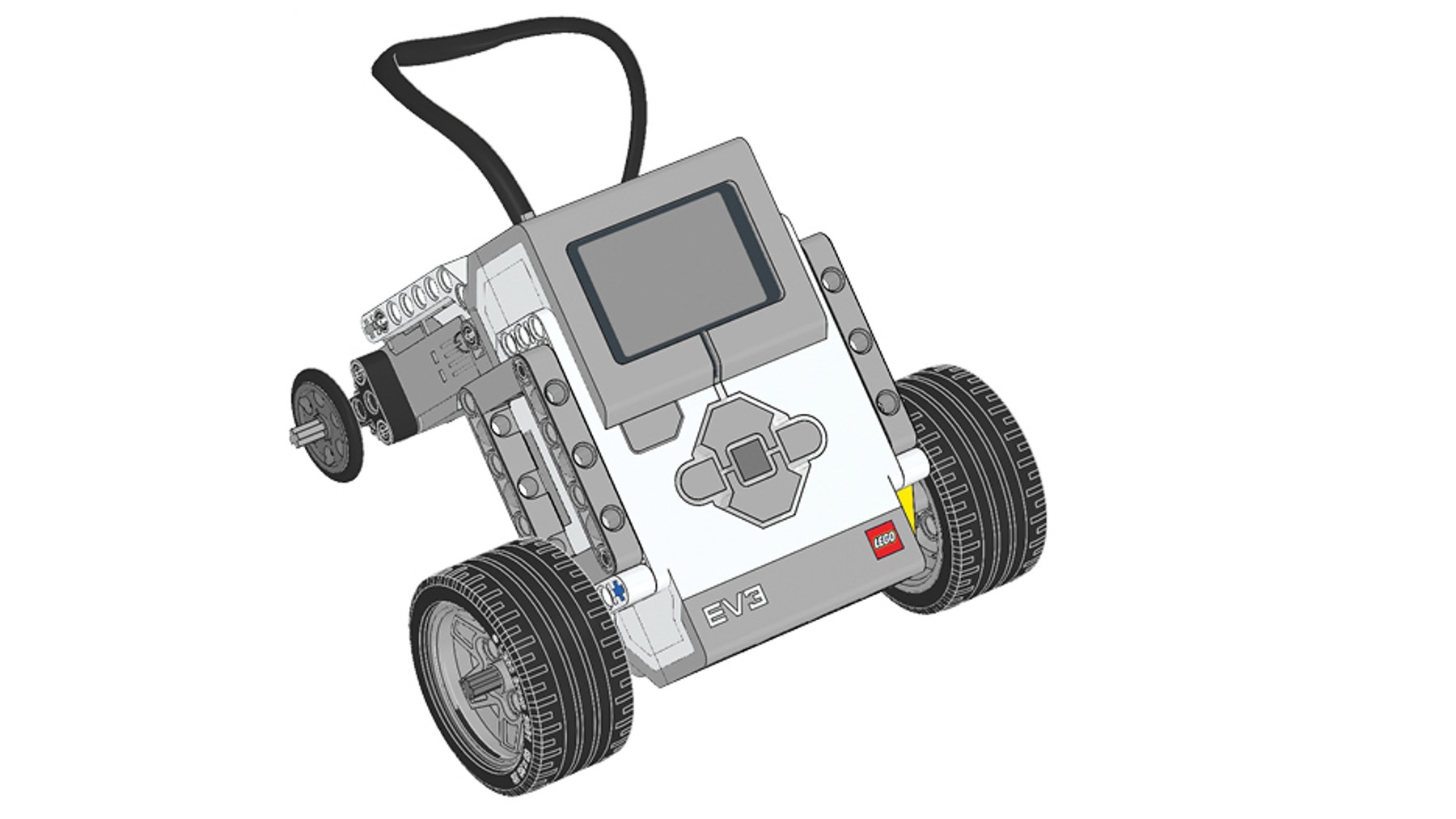
它将帮助你探究这些不准确是由设计和程序的哪些方面导致的。
进行一次测试运行。


将模型放置在坚固的水平面上并标示出其起始位置。运行程序,并在模型停止移动后标记停止位置。
斜坡机器人 (Bevel Bot) 移动 100 厘米了吗?计算的电机圈数、实际的电机圈数和计算的移动距离(厘米)显示出来了吗?
记录结果。

在测试表中记录实验编号、计算的移动距离和实际测量的移动距离。确保在表单中留出足够空间,方便进一步计算。
使用默认模型和程序进行实验。针对每次为确定其影响而进行的调整,重复实验。
进行实验
进行实验时请牢记以下提示:
- 计算的电机圈数、实际的电机圈数和计算的移动距离(厘米)会显示在显示屏上
- 至少重复进行三次实验并使用平均值,以确保获得最可靠的结果。
总结结果。
使用你在每次调整中的平均测量距离并计算误差,以确定最准确的版本。
对机器人设计和程序所做的哪些调整对其准确性影响最大?
你是怎样做到的?

哪些方面做得不错?哪些方面还有进步空间?
太棒了!现在你知道如何提高机器人的移动精度了,那让我们进入下一课吧。